problem01
1. Set up (define system, draw FBD, write ODEs) a particle problem. Just one particle. 2D or 3D, your choice. Use a force, or forces that you like (gravity, spring, air friction). Any example of interest. Find a numerical solution. Graph it. Animate it. Try to make an interesting observation.
System Description and Free Body Diagram
I think I have chosen a just hard enough interesting problem. A spring pendulum consists of a mass \(m\) attached to a spring of natural length \(l_0\) and spring constant \(k\).
The system experiences: - Spring force \(\vec{F_s} = k(\|{\vec{r}\|}-l_0)(-\hat{r})\) - Gravitational force \(\vec{F_g} = mg(-\hat{j})\) - Damping force \(\vec{F_d} = cv(-\hat{v})\)

Equations of Motion
In Cartesian coordinates, the equations of motion are:
\[\dot{\vec{r}} = \vec{v}\] \[\dot{\vec{v}} = -k(\|\vec{r}\|-l_0) \hat{r} - c \vec{v} - mg\hat{j}\]
The corresponding code for the ODE in file ./SpringPendulum/src/Physics.jl:
module Physics
using ..Parameters
using LinearAlgebra
using UnPack
export spring_pendulum!
function spring_pendulum!(du, u, p::Parameters.Param, t)
@unpack mass, gravity, stiffness, restinglen, viscosity = p
r⃗ = u[1:2]
v⃗ = u[3:4]
ĵ = [0.0; 1.0]
gravity = mass * gravity * (-ĵ)
spring = stiffness * (norm(r⃗) - restinglen) * (-normalize(r⃗))
drag = -viscosity * v⃗
force = (spring + drag + gravity)
du[1:2] = v⃗
du[3:4] = force / mass
end
endNumerical Solution
In file ./SpringPendulum/src/SpringPendulum.jl
module SpringPendulum
using DifferentialEquations
include("Parameters.jl")
include("Physics.jl")
include("Visualization.jl")
# problem setup
x₀, y₀ = (1, 0)
r₀ = [x₀;y₀]
v₀ = [1.0;0.0]
u₀ = [r₀;v₀]
tspan = (0.0,25.0)
p = Parameters.Param(m=1,g=1,c=0.0,k=1,l₀=0)
prob = ODEProblem(Physics.spring_pendulum!, u₀, tspan, p)
# solver
Δt = 0.001
sol = solve(prob, saveat=Δt, reltol=1e-6, abstol=1e-6)
# visualize
# ...
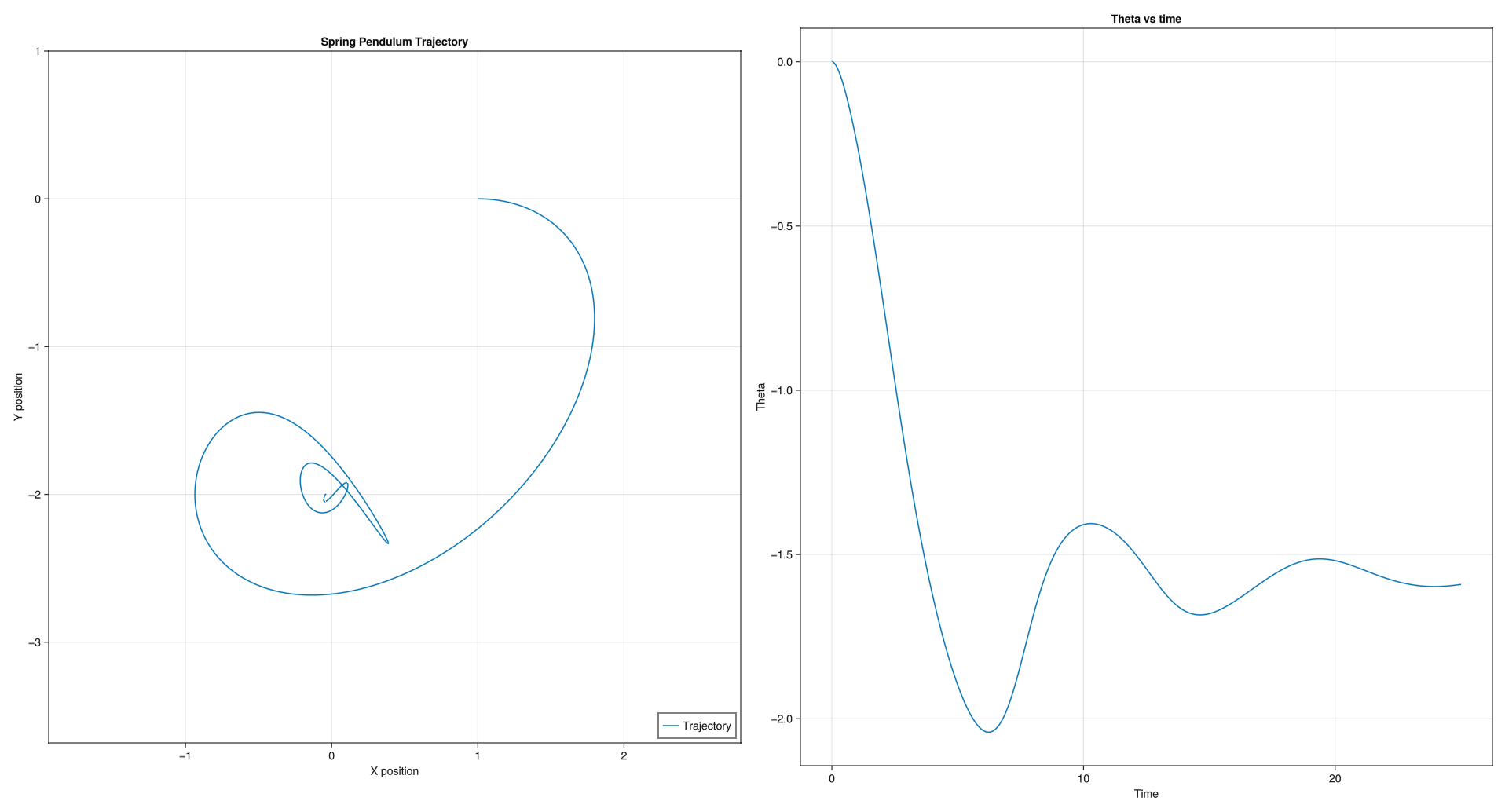
end # module SpringPendulumPhase Space Trajectory
Plot showing the system evolution in phase space. In file ./SpringPendulum/src/Visualization.jl:
Code corresponding to this in file SpringPendulum/src/Visualization.jl:
function plot_trajectory(sol; title="Spring Pendulum Trajectory")
a = reduce(hcat, sol.u)'
x = a[:, 1]
y = a[:, 2]
θ = atan.(a[:, 2], a[:, 1])
xlimits = (minimum(x)-1, maximum(x)+1)
ylimits = (minimum(y)-1, maximum(y)+1)
trajectory_plot = Figure()
trajectory = Axis(trajectory_plot[1, 1],
title=title,
xlabel="X position",
ylabel="Y position",
limits=(xlimits, ylimits),
aspect=1,
)
lines!(trajectory, x, y,
label="Trajectory",
)
axislegend(position=:rb)
trajectory = Axis(trajectory_plot[1, 2],
title="Theta vs time",
xlabel="Time",
ylabel="Theta",
)
lines!(trajectory, sol.t, θ)
return trajectory_plot
endAnimation
The following shows the animation for the solution system. The code corresponding to this animation:
TODO: add springs to visualise
The code corresponding to this animation is in file ./SpringPendulum/src/Visualization.jl:
function makie_animation(sol; filename="sol_animation.gif", title="Animation")
sol_matrix = reduce(hcat, sol.u)'
x = sol_matrix[:, 1]
y = sol_matrix[:, 2]
θ = atan.(sol_matrix[:, 2], sol_matrix[:, 1])
# coarse boundaries, for continuous(interpolated) boundary see: https://docs.sciml.ai/DiffEqDocs/stable/examples/min_and_max/
xlimits = (minimum(x)-1, maximum(x)+1)
ylimits = (minimum(y)-1, maximum(y)+1)
time = Observable(0.0)
x = @lift(sol($time)[1])
y = @lift(sol($time)[2])
# Create observables for line coordinates
line_x = @lift([0, $x])
line_y = @lift([0, $y])
animation = Figure()
ax = Axis(animation[1, 1], title = @lift("t = $(round($time, digits = 1))"), limits=(xlimits, ylimits), aspect=1)
scatter!(ax, x, y, color=:red, markersize = 15)
lines!(ax, line_x, line_y, color=:black)
framerate = 30
timestamps = range(0, last(sol.t), step=1/framerate)
record(animation, filename, timestamps;
framerate = framerate) do t
time[] = t
end
return animation
endObservations
- Energy exchange between potential and kinetic forms
- Damped oscillations due to viscous friction
- For some parameters there is weird behaviour at very small scales. This is probably an artifact of the solver and floating point truncations. I was unable to reproduce this, but I had shown this to Professor Andy and Ganesh Bhaiya.
- Increasing
cby a little has a drastic effect - The problem was fun to simulate
- Julia was fun to code in: Libraries were ergonomic to use, DifferentialEquations.jl, and Makie.jl
- I noticed only much later that all of the trajectories for when resting length is zero are elipses.